


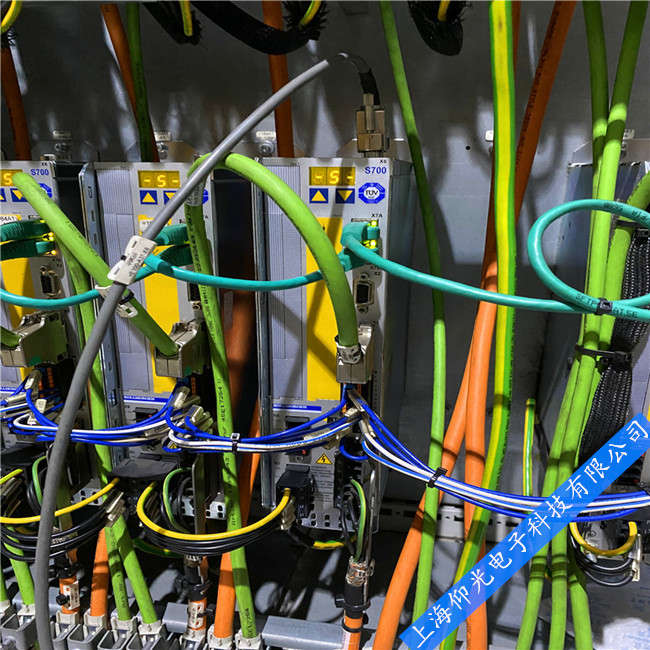
ӡˢ�C�Ơ�Ħ���ŷ��(q��)������08�S���������£�
F08 ���ٶ� 늙C�ٶ��^�ߣ�λ��ƫ��
F09 늿ɲ�ֻ�x�惦�� �ԙz�e�`
F10 ��̖ʧ�`���o(h��) ��̖ʧ�`���o(h��)(���|�Ļ���|����)
F11 �Ƅ��� ���|�ġ���·���ӵ�
F12 늙C��λ 늙Cλ�ÁGʧ(���|�ĵ�)
ӡˢ�C�Ơ�Ħ���ŷ��(q��)������08�v�������Ơ�Ħ���ŷ��(q��)����Ŀ��(bi��o)�ٶȺͼ��ٶ�ֵ�����ٶȺͼ��ٶ�ǰ�����Դ_�������ƻ�·�Ŀ�ؕ�I(xi��n)����(sh��)�W(xu��)��ģ��������ŷ�ϵ�y(t��ng)�У��^��׃�������ڜy����׃���������ٶȻ�λ�ã��������O(sh��)���c���S�����Sģ�ͣ������Ƶ�ϵ�y(t��ng)��ͨ�^��Gp��S����ǰ�����ƿ����ڔ�(sh��)�W(xu��)�������麯��(sh��)����ʾ���Q��Ԓ�f�^��׃�������O(sh��)��ֵ�����қ]���e�`���ӑB(t��i)��(y��ng)�ó�����Ҫ����푑�(y��ng)���Ա��ⳬ�{(di��o)���^�L���O(sh��)�Õr�g����������PID����������ܵ���������(w��n)����څ�ݵ����ơ�ǰ������ͨ�^�A(y��)�y���F(xi��n)���`���������������ǵȴ�PID����푑�(y��ng)�^ȥ���`��Ķ�������ϵ�y(t��ng)��푑�(y��ng)���@ʹ��PID��������a���o���A(y��)�y��Ӱ푣�����׃����ؓ(f��)�d�����������������}����ԃ�Ϻ��������
�D(zhu��n)�dՈע����̎���Ϻ�������ӿƼ����I(y��)�ŷ��(q��)�����S��,�ŷ�늙C�S��
����朽ӣ�http://kukud.com.cn/fuwu/Services_Show6656.htm
�ŷ��(q��)�����S�� �ŷ�늙C�S�� �|�����S�� ׃�l���S��
(li��n)ϵ��ʽ��
�Ԓ��021-50157782
�֙C��13817011982 ��̖ͬ
�]�䣺shygdzi@163.com
(li��n)ϵ�ˣ�����
�W(w��ng)ַ��http://kukud.com.cn
�� �҂��_���Üyԇ�ýo�͑�����������
��һƪ�����������|�����S�� GT1695M-XTBD�����������
��һƪ��ؐ���R1045�ŷ��(q��)�����S��-��7200�^���S��
