


�Cе�O��Ơ�Ħ���ŷ������S���ֈ��a��
����E/P��... ��-��-S-��F01*��F02*��F03*��F04��F05*��F06��F07��F08*��F09��F10��F11��F12��F13*��F14��F15��F16*��F17��F18��F19*��F20��F21��F22��F23��F24��F25��F26��F27��F28��F29��F30��F31��F32
�Cе�O��Ơ�Ħ��������Ҋ��������Щ��
1�������ϬF��늙C���܆���
��������ԭ��ͣ�C���o�i��,׃�l�����\�l��̫��,�Cе����,�B�i���o
������Q��ʩ���z��������ֹͣ���o�����o�Ƿ��λ,�����O��׃�l���l�ʡ������D�Ӛ�Û�S���z����Ӳ����Ƿ��п����F�����Ιz������ܲ����Пo�pʧ���Ɖģ��z��������Ĺ�����B�Ƿ�λ���_�CҪ��λ�á�
��������ԭ��ӡ�z݁���������m��ɶˉ���������Ĥ����Ϗ����в��ӻ����^С����Ĥ�����к��~߅���������Ĥ�g�A���п՚⡣���L��̫��Ĥ�^���׃�Ρ���ֱ݁�����`���ӡˢ��݁����D��׃����ӡ���ʡ��O���L��ʹ��δ���Ʊ��B����Ҋ�p�ć��أ��������ȓpʧ��
������Q��ʩ���{�����m�ĉ��������{�������{���շž폈���ͳ����Ϡ�������ʹ�Ï������⡣�Q���ϣ����Ʊ�Ĥ�g���ݡ��{�����m�ĺ���ضȺ��L��������݁�`�����ֲ������ؕr��������ư档���Qĥ�p�������z���O��֏��O��ʹ�þ��ȡ�
�Ơ�Ħ���ŷ�����Ŀ���ٶȺͼ��ٶ�ֵ�����ٶȺͼ��ٶ�ǰ�����Դ_�������ƻ�·�Ŀ�ؕ�I�����W��ģ��������ŷ�ϵ�y�У��^��׃�������ڜy����׃���������ٶȻ�λ�ã��������O���c���S�����Sģ�ͣ������Ƶ�ϵ�y��ͨ�^��Gp��S����ǰ�����ƿ����ڔ��W�������麯������ʾ���Q��Ԓ�f�^��׃�������O��ֵ�����қ]���e�`���ӑB���ó�����Ҫ����푑����Ա��ⳬ�{���^�L���O�Õr�g����������PID����������ܵ�������������څ�ݵ����ơ�ǰ������ͨ�^�A�y���F���`���������������ǵȴ�PID����푑��^ȥ���`��Ķ�������ϵ�y��푑����@ʹ��PID��������a���o���A�y��Ӱ푣�����׃����ؓ�d������
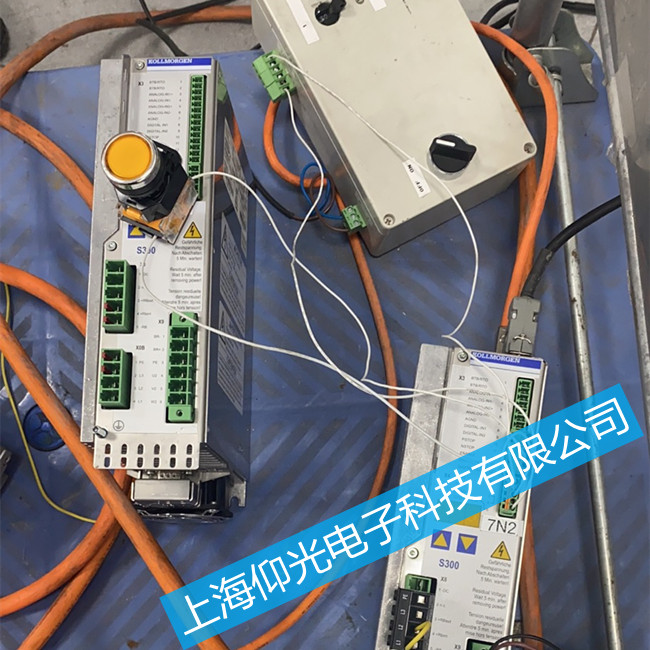
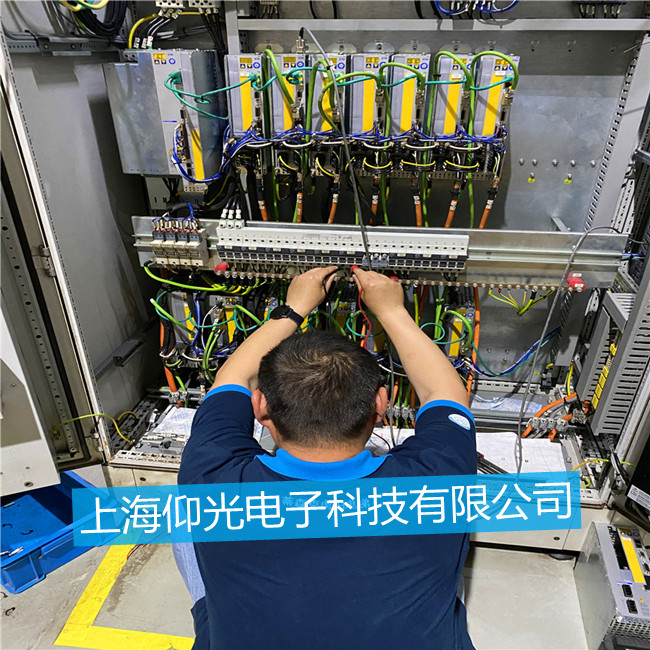
�D�dՈע����̎���Ϻ�������ӿƼ����I�ŷ������S��,�ŷ�늙C�S��
����朽ӣ�http://kukud.com.cn/fuwu/Services_Show6502.htm
�ŷ������S�� �ŷ�늙C�S�� �|�����S�� ׃�l���S��
ϵ��ʽ��
�Ԓ��021-50157782
�֙C��13817011982 ��̖ͬ
�]�䣺shygdzi@163.com
ϵ�ˣ�����
�Wַ��http://kukud.com.cn
�� �҂��_���Üyԇ�ýo�͑�����������
��һƪ��������ӡˢ�C�Ơ�Ħ���ŷ������S��-�^�d����
��һƪ���]����
